

Original Post


[WIP+REL] Stance Maker
Hey,
I've started a stance maker for toribash modding.
Contrary to what one might think, I have no problem with the rotation angles, but I have a lot of problem to understand how position works.
See by yourself :
First screenshot : i make my pose in game, and i launch the script
Second screenshot : i load the generated tbm file... as you can see, there are some glitches with the position of the joints and bodyparts.
If somebody (Blam ?) could fix that for me...
Anyway, here's the code :
I've started a stance maker for toribash modding.
Contrary to what one might think, I have no problem with the rotation angles, but I have a lot of problem to understand how position works.
See by yourself :
First screenshot : i make my pose in game, and i launch the script
Second screenshot : i load the generated tbm file... as you can see, there are some glitches with the position of the joints and bodyparts.
If somebody (Blam ?) could fix that for me...
Anyway, here's the code :
local player_index = 0
local body_index
local body_info
local angle_x, angle_y, angle_z
local trx, try
local file = io.open("!test.tbm","w")
file:write ("# mod automatically generated by Melmoth's Stance Maker\n\n")
for joint_index = 0,19 do
joint_info = get_joint_info (player_index, joint_index)
joint_pos = get_joint_pos2 (player_index, joint_index)
local radius = get_joint_radius (player_index, joint_index)
local jointname = string.lower(joint_info.name)
jointname,_ = jointname:gsub("right ", "r_")
jointname,_ = jointname:gsub("left ", "l_")
file:write ("joint " .. string.lower(jointname) .. "\n")
file:write ("\tradius " .. radius .. "\n")
file:write ("\tpos " .. joint_pos.x .. " " .. (0.45 + joint_pos.y) .. " " .. (0.06 + joint_pos.z) .. "\n")
end
file:write ("\n")
for body_index = 0,20 do
body_info = get_body_info (player_index, body_index)
local bodyname = body_info.name
if (bodyname == "THORAX") then
bodyname = "groin"
end
angle_y = math.asin(body_info.rot.r2) -- Calculate Y-axis angle
C = math.cos(angle_y)
angle_y = -(angle_y * 180) / math.pi
if ( math.abs( C ) > 0.005 ) then
-- no Gimball lock, so get X-axis angle
trx = body_info.rot.r10 / C
try = -(body_info.rot.r6 / C)
angle_x = -(math.atan2( try, trx ) * 180) / math.pi
trx = body_info.rot.r0 / C -- Get Z-axis angle
try = -(body_info.rot.r1 / C)
angle_z = -(math.atan2( try, trx ) * 180) / math.pi
else
-- Gimball lock has occurred
angle_x = 0 -- Set X-axis angle to zero
trx = body_info.rot.r5 -- And calculate Z-axis angle
try = body_info.rot.r4;
angle_z = -(math.atan2( try, trx ) * 180) / math.pi
end
file:write ("body " .. string.lower(bodyname) .. "\n")
file:write ("\tsides " .. body_info.sides.x .. " " .. body_info.sides.y .. " " .. body_info.sides.z .. "\n")
file:write ("\tpos " .. body_info.pos.x .. " " .. (0.45 + body_info.pos.y) .. " " .. (0.06 + body_info.pos.z) .. "\n")
file:write ("\trot " .. angle_x .. " " .. angle_y .. " " .. angle_z .. "\n")
file:write ("\n")
end
file:close()
Hmm...
your conversion is fine, as this pic shows:
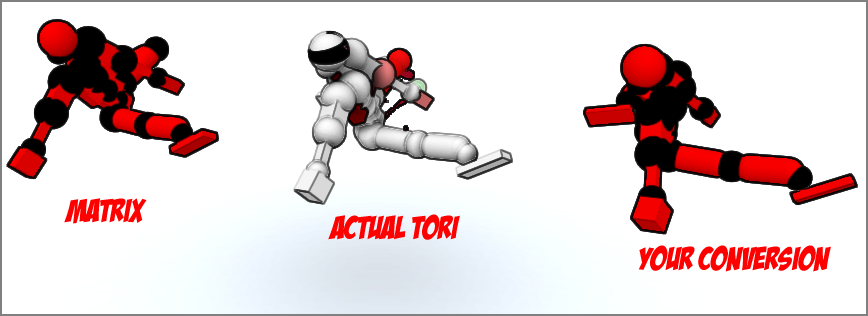
drawn using:
your conversion is fine, as this pic shows:
drawn using:
add_hook("draw3d","test",
function()
set_color(0,0,0,1)
for joint_index = 0,19 do
joint_info = get_joint_info (player_index, joint_index)
joint_pos = get_joint_pos2 (player_index, joint_index)
local radius = get_joint_radius (player_index, joint_index)
draw_sphere(joint_pos.x-3,joint_pos.y,joint_pos.z,radius)
draw_sphere(joint_pos.x+3,joint_pos.y,joint_pos.z,radius)
end
for body_index = 0,20 do
body_info = get_body_info (player_index, body_index)
angle_y = math.asin(body_info.rot.r2) -- Calculate Y-axis angle
C = math.cos(angle_y)
angle_y = -(angle_y * 180) / math.pi
if ( math.abs( C ) > 0.005 ) then
-- no Gimball lock, so get X-axis angle
trx = body_info.rot.r10 / C
try = -(body_info.rot.r6 / C)
angle_x = -(math.atan2( try, trx ) * 180) / math.pi
trx = body_info.rot.r0 / C -- Get Z-axis angle
try = -(body_info.rot.r1 / C)
angle_z = -(math.atan2( try, trx ) * 180) / math.pi
else
-- Gimball lock has occurred
angle_x = 0 -- Set X-axis angle to zero
trx = body_info.rot.r5 -- And calculate Z-axis angle
try = body_info.rot.r4;
angle_z = -(math.atan2( try, trx ) * 180) / math.pi
end
set_color(1,0,0,1)
if(body_index == 0) then
draw_sphere(body_info.pos.x-3,body_info.pos.y,body_info.pos.z,body_info.sides.x)
draw_sphere(body_info.pos.x+3,body_info.pos.y,body_info.pos.z,body_info.sides.x)
elseif(body_index > 0 and body_index < 15) or (body_index > 18) then
draw_box(body_info.pos.x-3,body_info.pos.y,body_info.pos.z,body_info.sides.x,body_info.sides.y,body_info.sides.z,angle_x,angle_y,angle_z)
draw_box_m(body_info.pos.x+3,body_info.pos.y,body_info.pos.z,body_info.sides.x,body_info.sides.y,body_info.sides.z,body_info.rot)
else --Legs are odd..
draw_capsule(body_info.pos.x-3,body_info.pos.y,body_info.pos.z,body_info.sides.x+0.2,body_info.sides.y-0.17,angle_x,angle_y,angle_z)
draw_capsule_m(body_info.pos.x+3,body_info.pos.y,body_info.pos.z,body_info.sides.x+0.2,body_info.sides.y-0.17,body_info.rot)
end
end
end
):D
I can try to look over the mod file or something and check if I see something suspisios. rawr. But ye. Lua people should look further into this ofc.
EDIT: is that code you posted blam the lua code?
EDIT: is that code you posted blam the lua code?
Sigma | Gata
Lost pet looking for home
OMG, thanks so much melmoth. now hampa dosent have to put in starting stances into toribash (well not yet anyway) we just did it for him
*gives tampion a lolcookie*
so to test it i just copy the script and put it in my scrpits folder? and then you lcick on the scrpt ingame.... and hten you get the file from the mod folder? is that right?
*gives tampion a lolcookie*
so to test it i just copy the script and put it in my scrpits folder? and then you lcick on the scrpt ingame.... and hten you get the file from the mod folder? is that right?
- its been a while
Originally Posted by Tapion

I can try to look over the mod file or something and check if I see something suspisios. rawr. But ye. Lua people should look further into this ofc.
EDIT: is that code you posted blam the lua code?
code I posted was just to check for any really obvious errors.
:D